English / Français
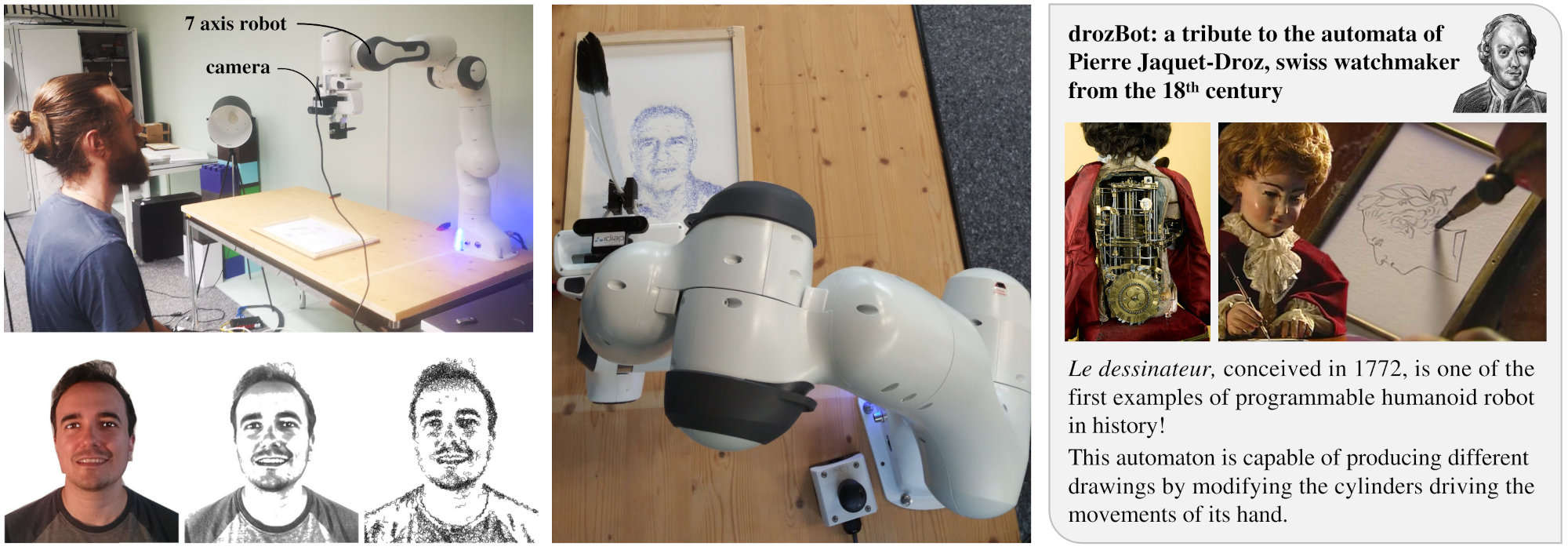
drozBot, the portraitist robot


drozBot draws portraits with a conventional pen and paper. It first takes a snapshot of the person by framing the face through recognition of the principal facial features (eyes, nose, mouth). The portrait in a digital format is then converted to a fluid movement mimicking the gestures of an artist.
This installation aspires to explore the frontiers between optimality and randomness in Artificial Intelligence (AI) applications. The learning mechanisms behind AI often use random processes to search for solutions (stochastic sampling during optimization). This randomization component behind these learning algorithms for example allow a robot to find solutions quickly without having to test each possible option. drozBot instead relies on a different perspective, by solving an optimal control problem aiming at determining the pen strokes to generate to best cover the canvas for each portrait to draw. Interestingly, this generative process does not rely on randomness while the result appears to be composed of aleatory strokes, with doodles revealing the global objective only when the drawing is finished. These doodles appear to be random when they are observed from close distance, but they are in reality optimal, with a unique result with respect to the global objective given to the robot.
To reach this drawing capability, the objectives of the robot are multiple. First, it has to generate smooth gestures while controlling the orientation and pressure of the pen on the paper. Then, it has to define a series of strokes reproducing the different contrasts in the image, by forecasting a greater number of overlapping paths in darker regions of the image, while reducing the overall length of the movement.
When observing the robot at work, the doodles appear meaningless at first sight. The global objective is only revealed with the progression of the drawing. Indeed, the appearing chaos of the first strokes disappear with the ensemble view of the final portrait.